0516-88601279
欢迎相关行业来电垂询,我们将以诚信与您共谋大计,共同发展!竭诚欢迎新老朋友来电垂询莅临指导!
我们的携手,将会为您的产品带来的演绎。

近几年,工业机器人在国内的应用案例迅速增加,主要集中在焊接、喷涂、搬运等领域,在折弯方面的应用还不多。而工件折弯是一种应用广泛又有一定危险性的工作,因此机器人折弯的市场前景是非常乐观的,国外已有很多成功经验。目前欧美市场钣金加工车间40%~50%的折弯机上配置机器人自动折弯系统,而中国目前折弯自动化才刚刚起步。未来10年内,折弯机器人在国内需求将呈直线上升趋势。
以机器人作为核心执行部件的数控板料折弯柔性加工单元是一套高度自动化的设备组合,具有高效率、高质量和高灵活性的优点。在折弯柔性加工单元中,选择合适的部件组合,能够为加工效率、灵活性提供更好的支撑。折弯精度取决于折弯机自身精度、机器人的定位精度、机器人与折弯机的协同控制;协同控制的难点在于机器人与折弯机的速度匹配,以及机器人托扶工件的运行轨迹;较差的跟随效果将严重影响折弯角度成形效果和板面平整度,从而影响成品的品质。
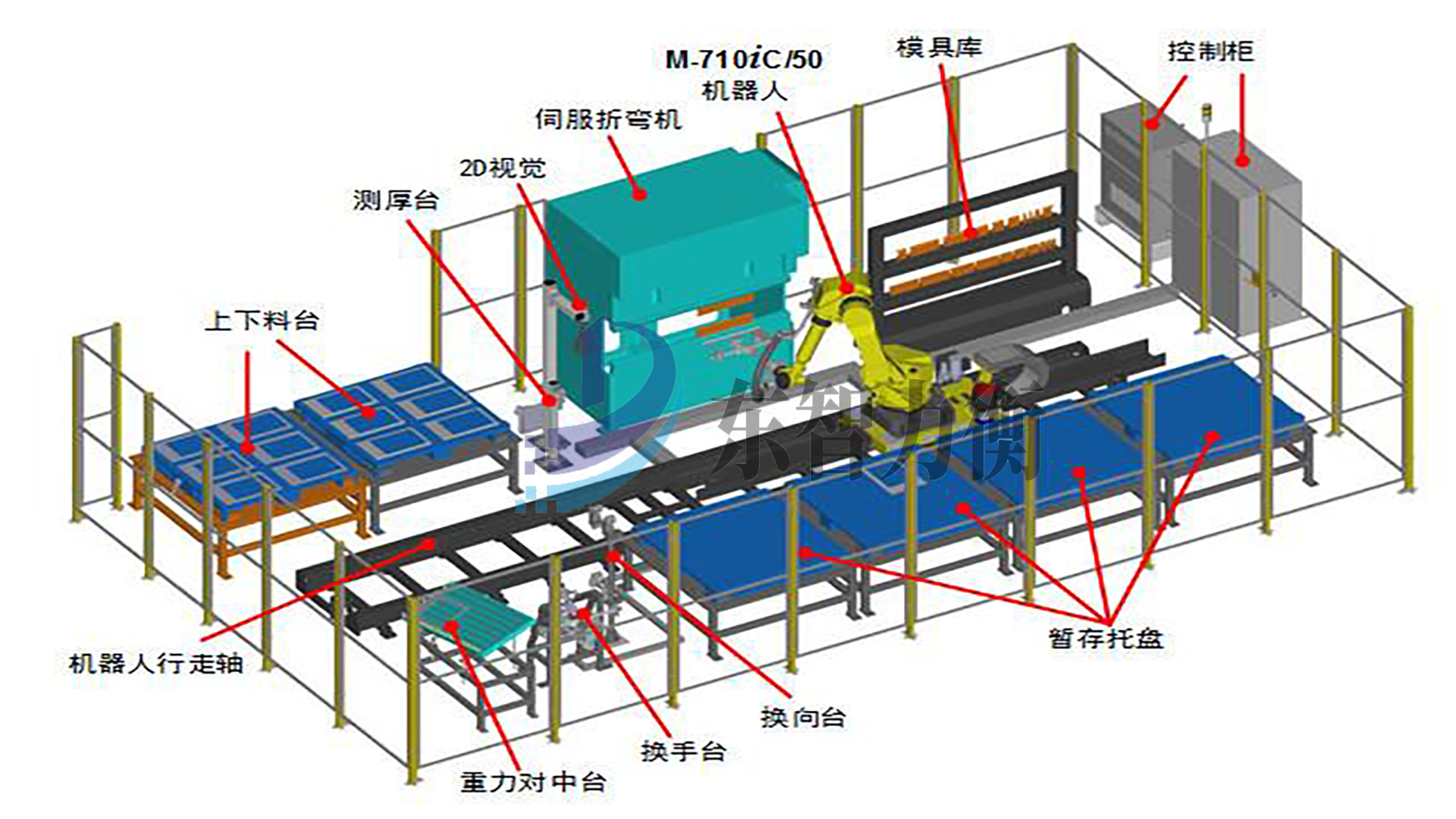
如图1所示,标准折弯加工单元以机器人和折弯机为核心,抓手、上料台、下料台、定位工作台、翻面架、换手装置、各种检测传感器为辅助部件。
图1 折弯加工单元整体布局
抓手是机器人代替人工、取放工件的“手”。折弯机器人的抓手一般是把多个吸盘安装在一个金属框架上构成的。
上料台和下料台通常采用堆垛货盘,也有采用传送带或辊道为单元输送原料和转运成品的。油性板材容易发生粘连,导致一次拿起多张板材,可在上料台旁边加装各种分张装置(如磁力分张器)和检测传感器,确保抓取板材为单张。
定位工作台是一个带挡边的倾斜平台,台面上分布微凸起的滚珠。机器人把钢板转移到定位台上,板材受重力自由滑落到挡边。 由于定位台的位置及挡边是固定的,因此机器人重新抓起板材时,板材与抓手的位置就相对精准固定了,为下一步折弯提供了基准。
翻面架是一个抓取装置的固定框架。当机器人需要换个位置拿工件时,可以把工件放到翻面架上将其固定,机器人再重新在新位置抓住工件。在一些特殊场合,也可以使用折弯机模具夹住工件后,改变抓取位置。
如图2所示,折弯加工单元工作主要分为上料、取料、对中、翻面、折弯、堆垛六个过程。
图2 折弯加工单元工作流程
上料:人工将需要加工的板料整垛放置到上料台上,上料台上安装板料检测开关,避免板料全部加工完后,机器人抓取托盘。
取料:机器人运行到上料台位置,通过抓手上安装的超声波传感器检测板材的高度,根据检测数据,自动运行到合适的位置进行板料的抓取,板料抓取后,通过测厚装置进行板料厚度的测量,避免出现一次抓取多张的板料,造成加工故障,测厚通过后,准备对中。
对中:机器人运行到定位台位置,将板料放置于定位台上进行精准定位(图3),定位完成后再次抓取板料,准备折弯。
图3 板料定位
翻面:根据工艺需求判断是否需要使用翻面架,如果需要,则将机器人运行到翻面架位置,将板料放置到翻面架上,机器人松开板料、避让,待翻面完成后进行板料抓取。
折弯:机器人运行到折弯机位置,将板料放平到折弯机下模上,通过折弯机后挡指传感器进行精准定位,定位完成后,机器人发送折弯信号给折弯机,并协同折弯机完成折弯动作(图4),判断是否需要再次折弯,来决定是否进行连续折弯。折弯是重点环节,折弯的技术难点在于机器人与折弯机的配合动作,即折弯跟随。机器人夹取或者托扶板料折弯时,板材变形、机器人需要根据特定的轨迹算法跟随板料做圆弧动作,并与板材始终保持相对固定的位置。
图4 板料折弯
码垛:机器人运行到下料台位置,因工件成形的区别,存在多种码垛工艺动作(图5),如常规矩阵码垛、单双层交叉码垛、正反相扣码垛等。
图5 板料码垛
目前市场上不管是通用的标准六轴机器人,还是机器人臂展或形体上针对折弯工艺优化的折弯专用机器人,都需要折弯跟随算法支撑,不跟随折弯的情况少之又少。没有好的跟随效果,夹具或者吸盘抓手会因为较差的跟随轨迹,拉扯工件,形成板材皱纹,影响成形质量。建立准确的机器人折弯跟随运动模型,有助于建立良好的跟随轨迹算法,从而获得优异的跟随效果。
图6为折弯运动模型。其中,各参数分别表示为,1)上模圆弧半径:R/mm。2)下模圆弧半径:r/mm。3)下模开口:V/mm。4)下模角度:∠b/度。5)工件厚度:T/mm。6)中性层到工件上表面厚度:λ/mm。7)工件折弯角度∠a/度。8)折弯机从夹紧点下行量:S/mm。
图6 折弯运动模型
根据运动模型可以计算出折弯角与折弯下行量的关系:
S={r×tan[(45°- ∠ b/4)+V/2]×sin(90°- ∠ a/2)-(r+R+T)}/cos(90°- ∠ a/2)+(r+R+T)
根据不同的机械参数,结合折弯角与折弯下行量关系的公式能得到折弯角度从180°到10°X方向和Z方向的位移变化的轨迹曲线,折弯模具及工件信息如表1所示,轨迹曲线如图7所示。
表1 折弯模具及折弯工件必要信息
图7 折弯角度与机器人运行轨迹关系
随着钣金制造业不断发展,机器人折弯有着越来越广阔的应用前景,相对于开发专用折弯机器人,开发适用于通用六轴机器人的折弯跟随模型算法,并应用于通用机器人上,开发成本更低。配合行业中多数优异品牌的机器人与其他辅助硬件,能够迅速推广机器人折弯应用。
|
上一条:钣金自动折弯机器人前景怎么样?
下一条:自动化钣金折弯机器人代替人工作业成为必然发展趋势 |
返回列表 |
推荐新闻
感谢您来到我公司官方网站,若您对我们的产品感兴趣,或想咨询公司相关问题,请为我们留言,我们将尽快回复并为您服务,谢谢!